Reconstructed using 15
IMU (XSens MVN)
Using 3 Sparse IMU
of XSens MVN.
Using 3 Standalone
Low-cost IMUs .
Overview
For upper extremity rehabilitation, quantitative measurements of a person’s capabilities during activities of daily living could provide useful information for therapists, including in telemedicine scenarios. Specifically, measurements of a person’s upper body kinematics could give information about which arm motions or movement features are in need of additional therapy, and their location within the home could give context to these motions. To that end, we present a new algorithm for identifying a person’s location in a region of interest based on a Bluetooth received signal strength (RSS) and present an experimental evaluation of this and a different Bluetooth RSS-based localization algorithm via fingerprinting. We further present algorithms for and experimental results of inferring the complete upper body kinematics based on three standalone inertial measurement unit (IMU) sensors mounted on the wrists and pelvis.
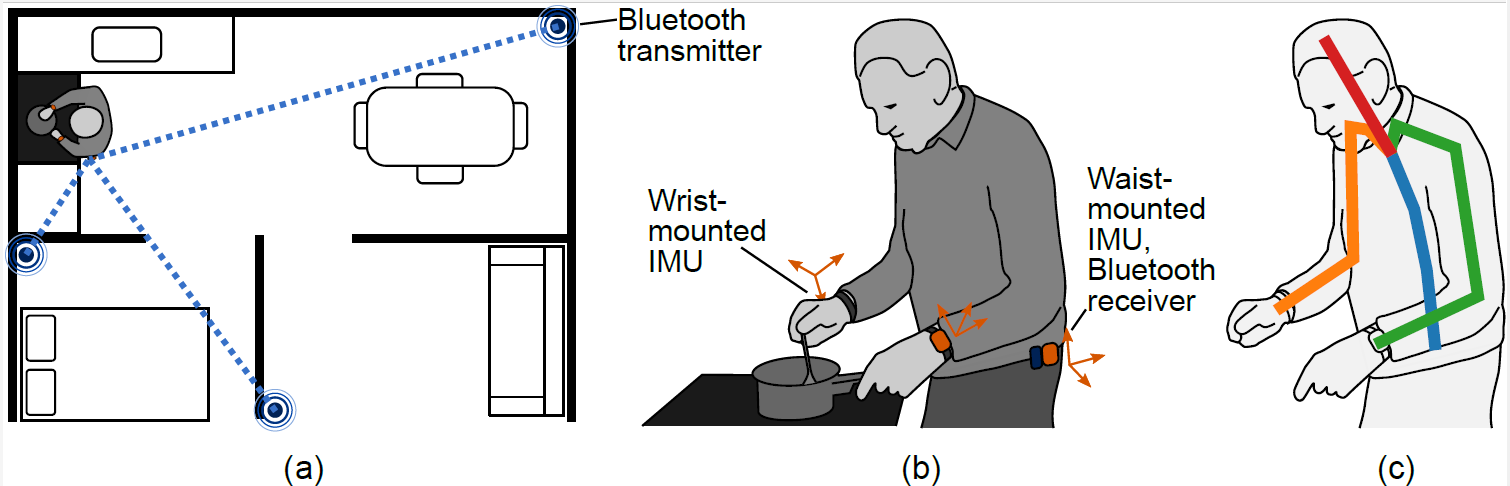
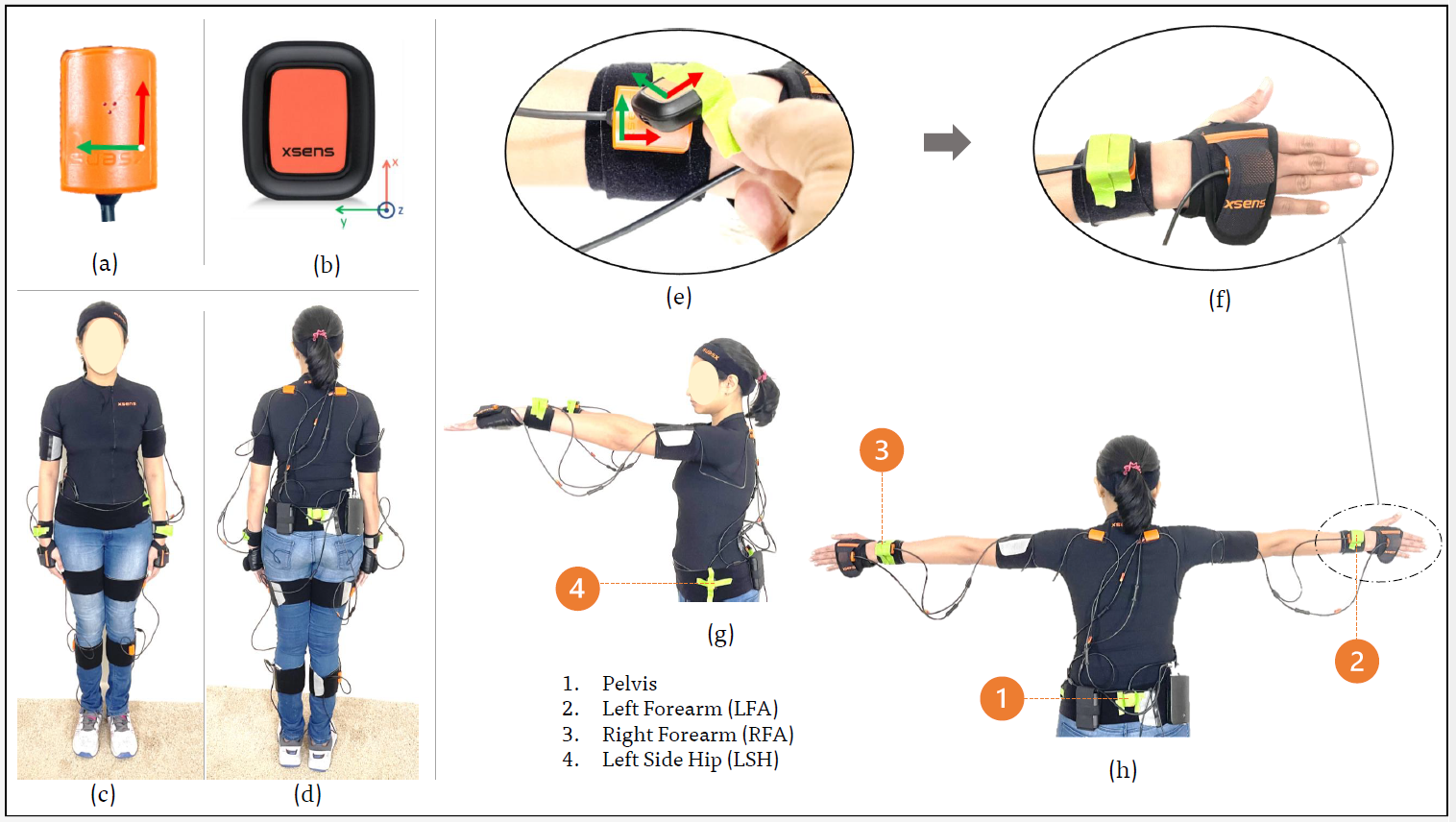
Data Collection Process

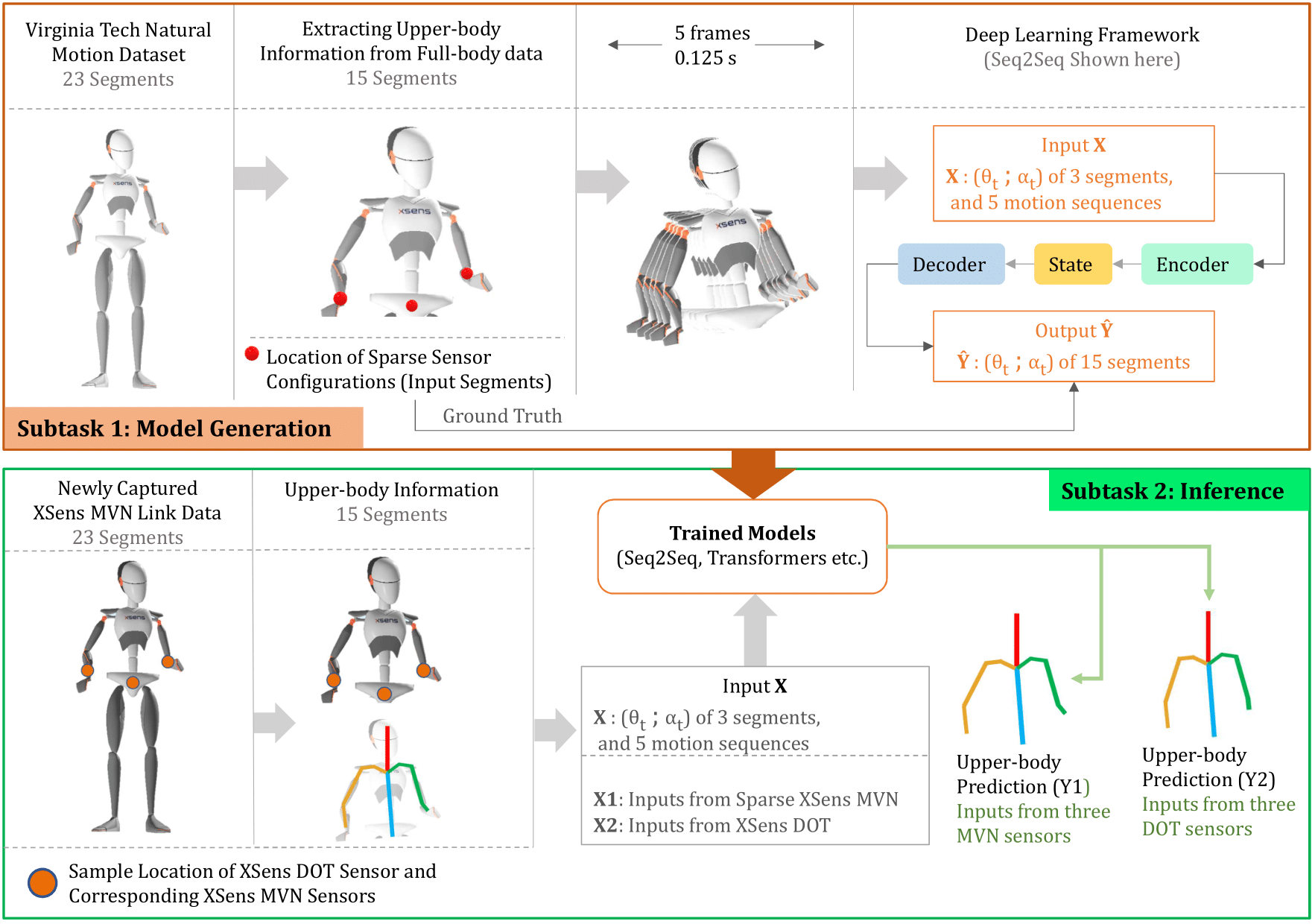
Data Processing & Deep Learning Pipeline
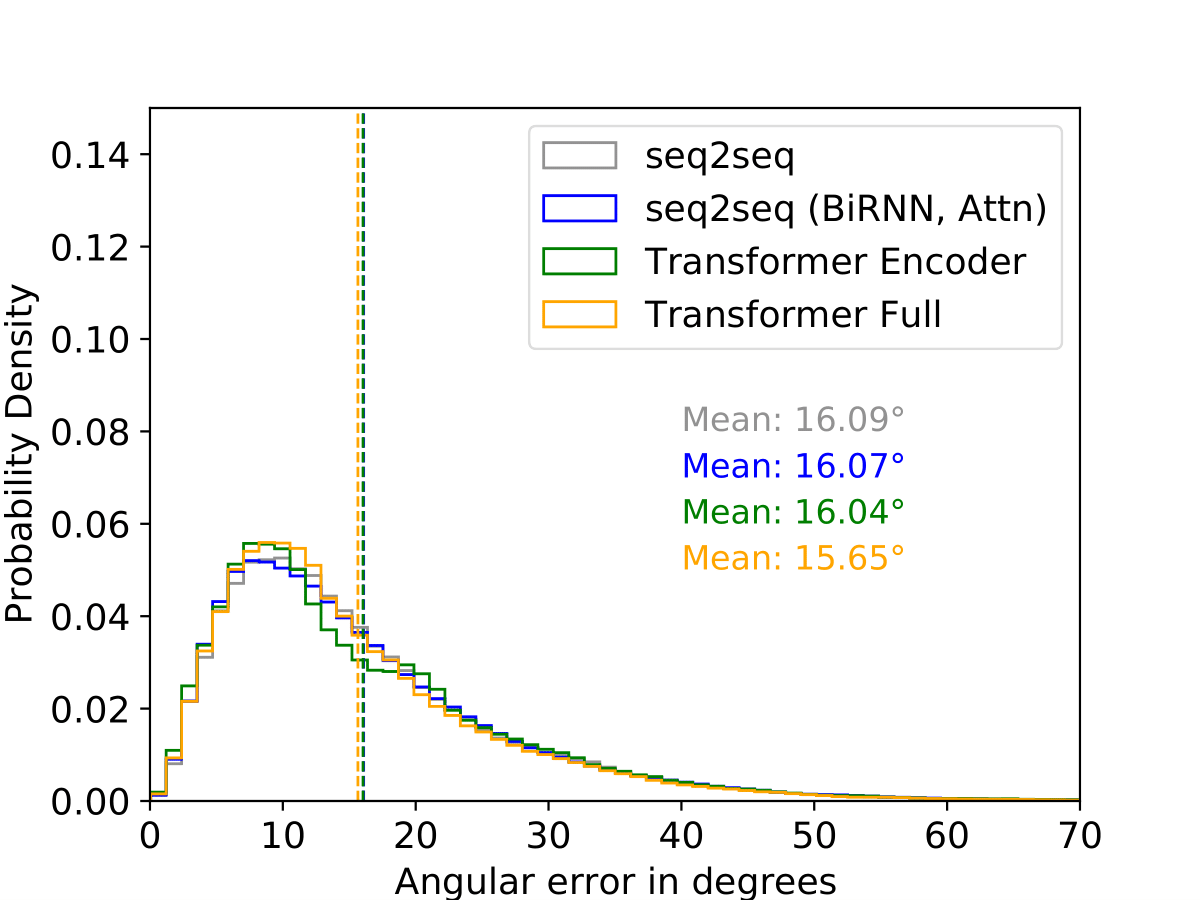
Quantitative Results
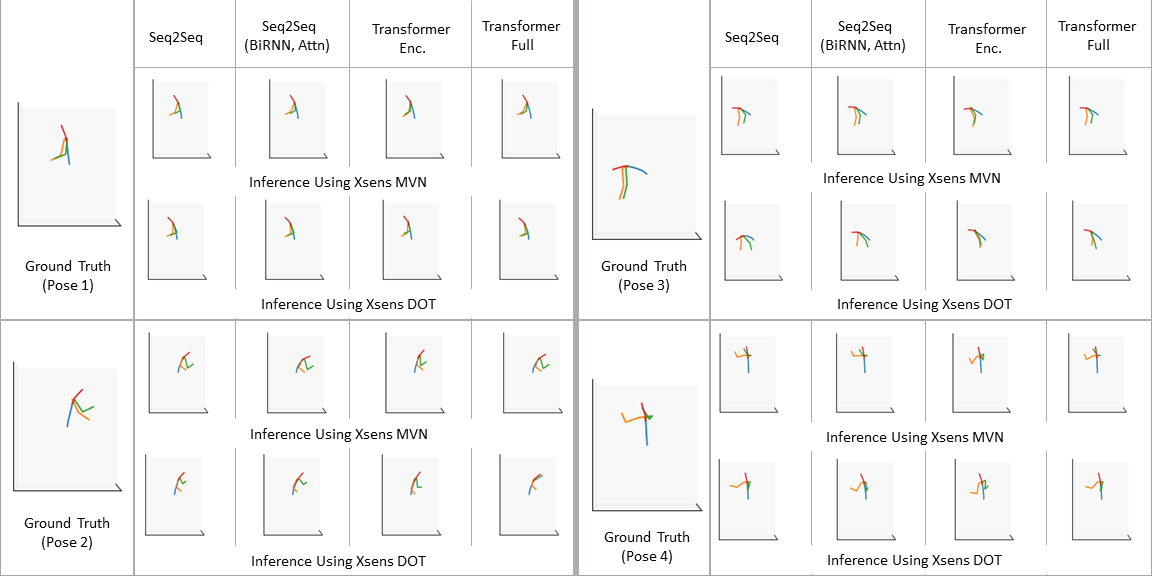
Qualitative Results
Remarks
On this page, I present a brief highlights of the upper body kinematics reconstruction using our proposed method, which was my primary contribution. Other aspects of the work, such as localization using RSSI, quantitative results are not presented here. For more details, please refer to the paper. This research was funded by the National Science Foundation (Grant # 2014499)
In collaboration with Carnegie Mellon University, we are currently developing new sensors that can simultaneously provide IMU and RSSI information. Our near future goal is to use these sensors to reconstruct the upper body kinematics and localize the person in the home.