Geometric Motion Planning in Task Space and Obstacle avoidance using Complementarity Constraints
Stony Brook University 1
Contribution
In this work, we introduce a novel Geometric Motion Planning algorithm that enables robots to adeptly execute constrained tasks. The proposed algorithm inherently adheres to two predominant task constraints: pure translation and pure rotation, thereby ensuring enhanced operational efficiency in various applications.
We also present a geometric method for the meticulous calibration of simulation workspaces to seamlessly align with their experimental counterparts. This approach proves especially beneficial for accurately replicating simulation workspaces in real life during the initial prototyping phase, enhancing the reliability and effectiveness of robotic systems in practical scenarios.
Collison Avaidance Using Complementarity Constraint
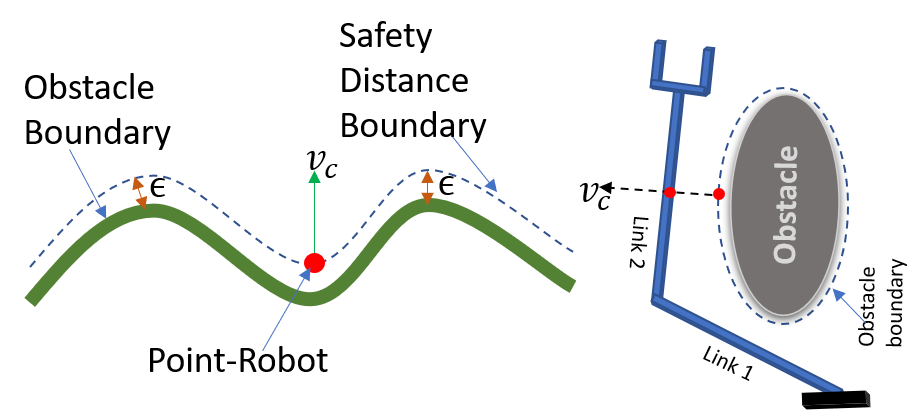
A point robot (left) and a 2R robot link (right)
in the vicinity of the distance from the obstacle,
experience compensating velocity that ensure avoiding the obstacles.
Example Applications
Video showing applications of the proposed Local Motion Planner
with Complementarity based Collision Avoidance.
Related Links
- Interacting Robotic Systems Laboratory (IRSL) Youtube Channel.
- Related (Prior) work Project Page.
- MS Thesis Project Page.
BibTeX
@INPROCEEDINGS{9341651,
author = {Sarker, Anik and Sinha, Anirban and Chakraborty, Nilanjan},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
title = {On Screw Linear Interpolation for Point-to-Point Path Planning},
year = {2020},
volume={},
number={},
pages={9480-9487},
doi={10.1109/IROS45743.2020.9341651}}