Overview
Robot motion is controlled in the joint space whereas the robots have to perform tasks in their task space.
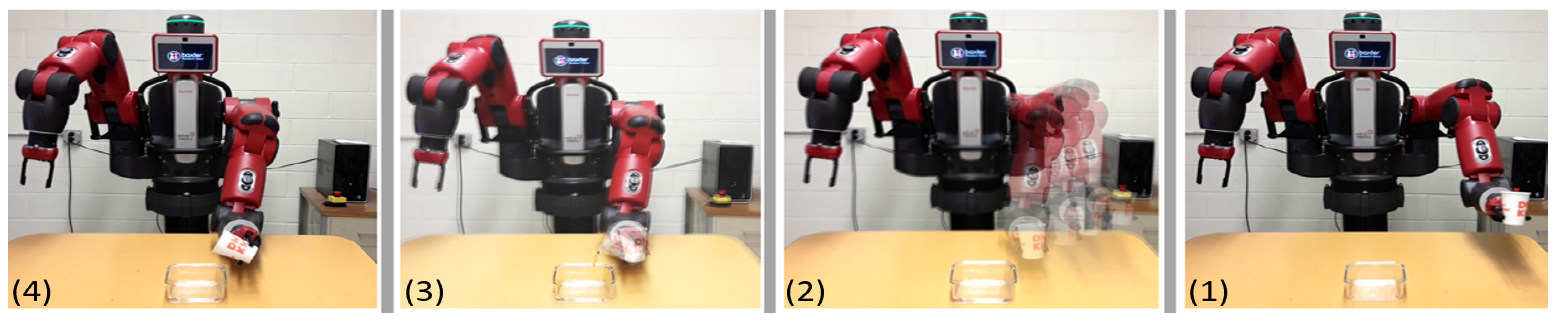
Many tasks like carrying a glass of liquid, pouring liquid, opening a drawer requires constraints on the end-effector during the motion. The forward and inverse kinematic mappings between joint space and task space are highly nonlinear and multivalued (for IK). Consequently, modeling task space constraints like keeping the orientation of the end-effector fixed while changing its position (which is required for carrying a cup of liquid without dropping it) is quite complex in the joint space.
We show that the use of screw linear interpolation to plan motions in the task space combined with resolved motion rate control to compute the corresponding joint space path, allows one to satisfy many common task space motion constraints in motion planning, without explicitly modeling them. In particular, any motion constraint that forms a subgroup of the group of rigid body motions can be incorporated in our planning scheme, without explicit modeling. We present simulation and experimental results on Baxter robot for different tasks with task space constraints that demonstrates the usefulness of our approach.
Example applications of the ScLERP based motion planner
IROS Presentation:
Related Links
- Interacting Robotic Systems Laboratory (IRSL) Youtube Channel.
- Related (Extended) work Project Page.