Overview
In this project, a local motion planner based on task space is introduced, which seamlessly integrates collision avoidance and constraints on the movement of the end effector while performing a task.
The core technical contribution of this work lies in the developements of a novel kinematic state evolution model for robots. This model encodes collision avoidance as a complementarity constraint. The paper establishes that the evolution of kinematic state with collision avoidance can be depicted as a Linear Complementarity Problem (LCP). By employing the LCP model in conjunction with Screw Linear Interpolation (ScLERP) in SE(3), the paper demonstrates the potential to calculate a path between two specific task space poses. This computation is possible by directly transitioning from the initial to the final pose, despite the potential presence of obstacles. The scalability of the proposed planner is substantiated through experiments conducted on a physical robot. We presented both simulated and experimental results, showcasing the effectiveness of the proposed approach in ensuring collision avoidance and adhering to task constraints.
We show that the use of screw linear interpolation to plan motions in the task space combined with resolved motion rate control to compute the corresponding joint space path, allows one to satisfy many common task space motion constraints in motion planning, without explicitly modeling them. In particular, any motion constraint that forms a subgroup of the group of rigid body motions can be incorporated in our planning scheme, without explicit modeling. We present simulation and experimental results on Baxter robot for different tasks with task space constraints that demonstrates the usefulness of our approach.
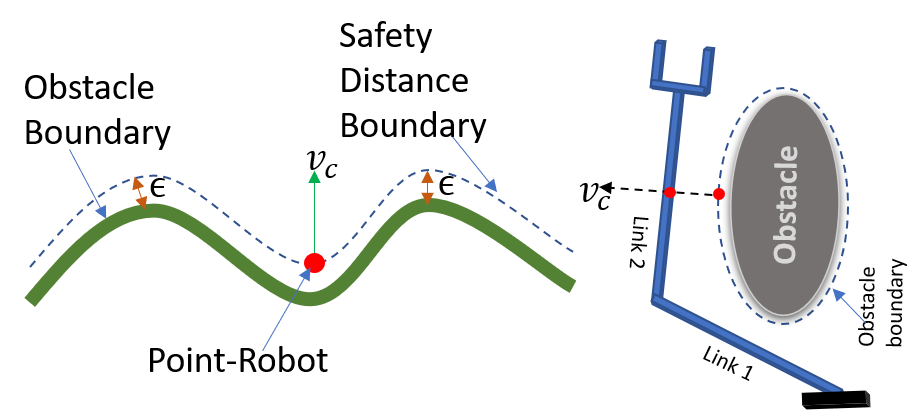
Collison Avaidance Using Complementarity Constraint
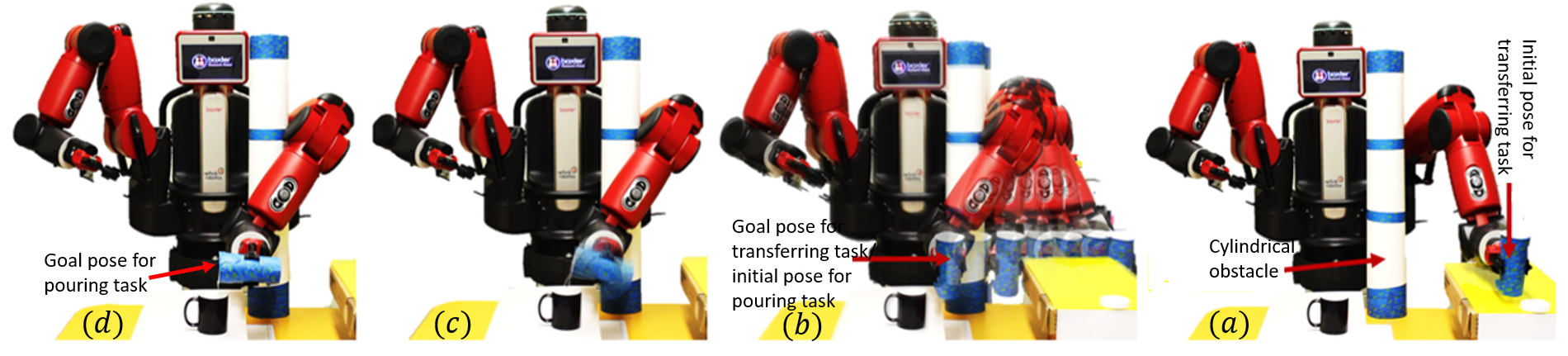
Example Applications
Related Links
- Interacting Robotic Systems Laboratory (IRSL) Youtube Channel.
- Related (Prior) work Project Page.
- MS Thesis Project Page.