Anik Sarker
Hello! I'm a PhD candidate in the deartment of Mechanical Engineering at Virginia Tech. I am passionate about solving challenging problems in geometry, statistics, machine learning, and computer vision. I’m particularly driven by the task of uncovering patterns in complex data and predicting what comes next—problems that appear in numerous real-world scenarios such as multimodal foundation models, time series forecasting, point cloud registration, robot motion planning, multimodal perception, state estimation, localization, and more.
I've been fortunate to work at the Assistive Robotics Laboratory, under the supervision of Dr. Alan Asbeck since Fall 2021. During my Masters, I had the privilege of being supervised by Dr. Nilanjan Chakraborty at the Interacting Robotic Systems Laboratory. I'm deeply interested in exploring the realms of Robotics and AI. Beyond academia, I bring hands-on industry experience as a Research Scientist Intern at Meta (Reality Labs), where I worked on multimodal sensor fusion and real-time tracking, and as an Applied Scientist Intern at Amazon (Amazon Robotics), where I contributed to building multimodal foundation models. In both research and industry, I have worked extensively with diverse modalities—many of which are temporal—such as text, images/videos, audio, numeric data, and rich sensor data including IMUs, EMG, Tactile sensors, and LiDAR.
Real Time Hand Tracking Algorithm
Authors: Anik Sarker · Meta Reality Labs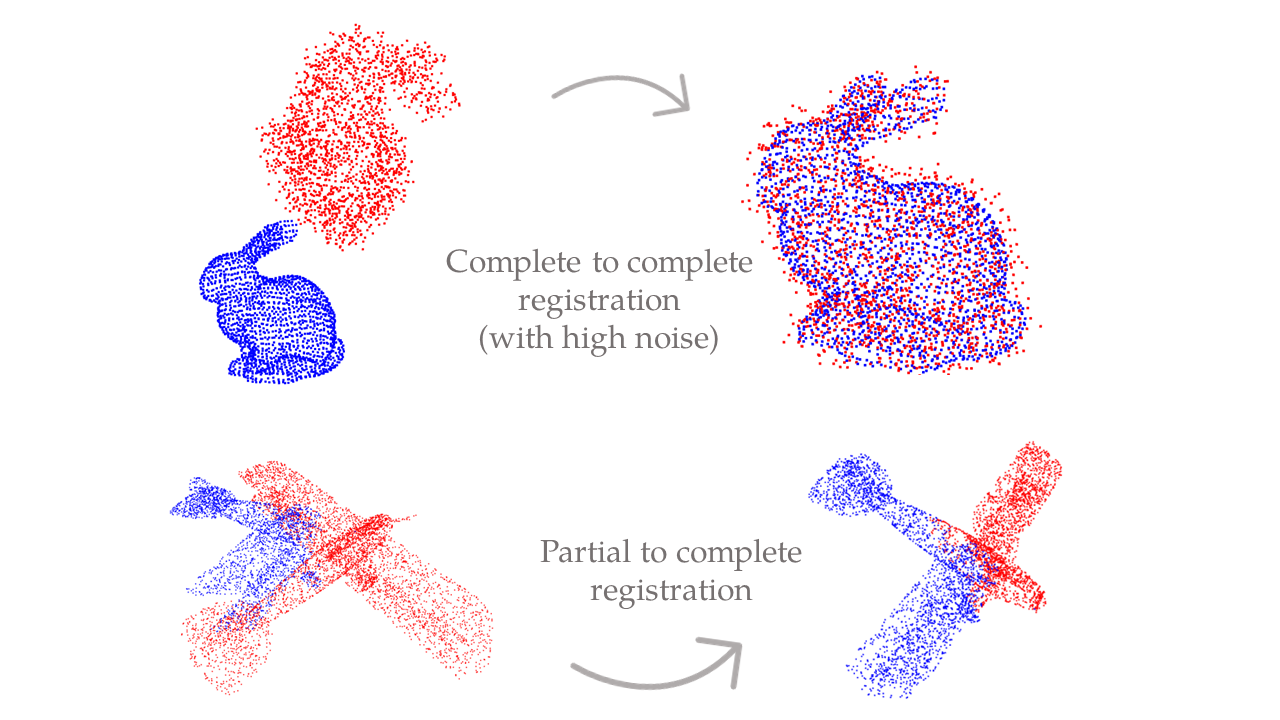
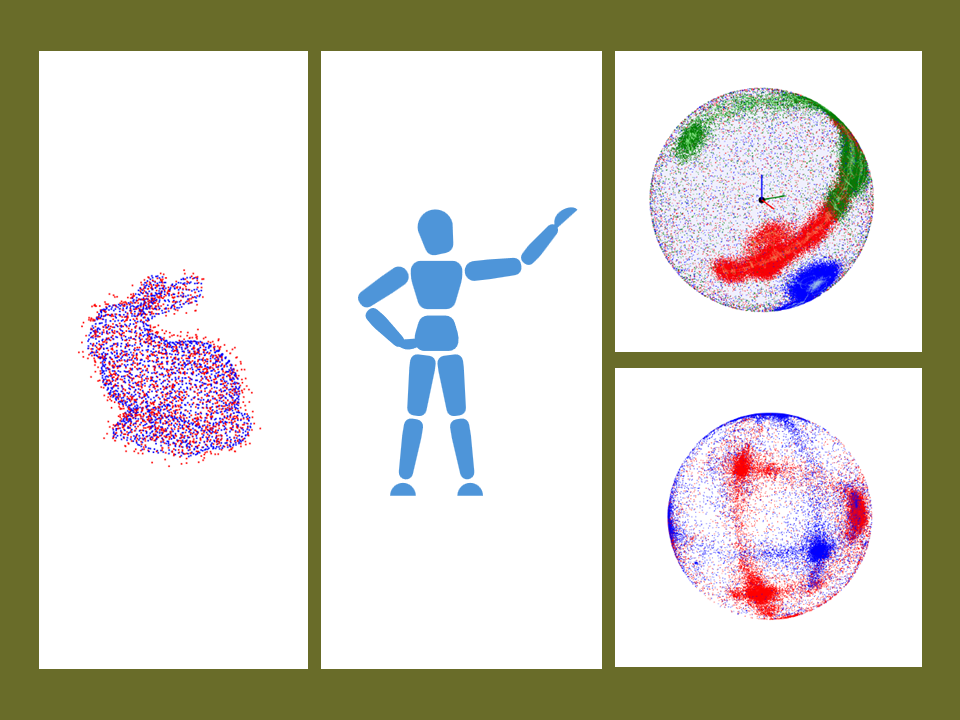
Spherical Point Pattern Marching and Applications
Authors: Anik Sarker · Alan T. Asbeck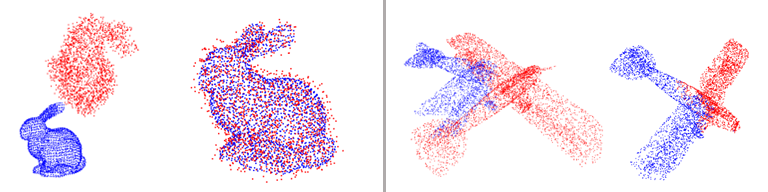

Accurate On-Body Distance Estimation Using BLE RSSI and IMU Sensor Fusion
Authors: Aksh Rajput · Anik Sarker · Alan T. AsbeckCorrespondence-Free Fast and Robust Spherical Point Pattern Registration.
Anik Sarker, Alan T. Asbeck
ICCV 2025
Webpage •
PDF •
Dataset & Code •
Capturing Upper Body Kinematics and Localization with Low-Cost Sensors for Rehabilitation Applications.
Anik Sarker, Don-Roberts Emenonye, Aisling Kelliher, Thanassis Rikakis, R. Michael Buehrer, Alan T. Asbeck
Sensors 22(6): 2300 (2022)
Webpage •
PDF •
On Screw Linear Interpolation for Point-to-Point Path Planning.
Anik Sarker, Anirban Sinha, and Nilanjan Chakraborty
IEEE International Conference on Intelligent Robots and Systems (IROS 2020)
Webpage •
PDF •
Task Space Planning With Complementarity Constraint-Based Obstacle Avoidance.
Anirban Sinha, Anik Sarker and Nilanjan Chakraborty
ASME 2021 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (IDETC-CIE 2021)
Webpage •
PDF •
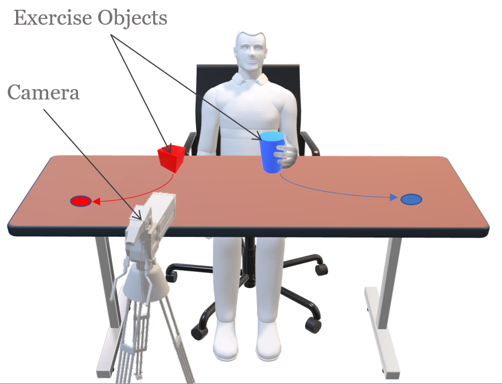
RIS-Aided Kinematic Analysis for Remote Rehabilitation.
Don-Roberts Emenonye, Anik Sarker, Alan T Asbeck, Harpreet S Dhillon, R Michael Buehrer
IEEE Sensors / August 2023
PDF
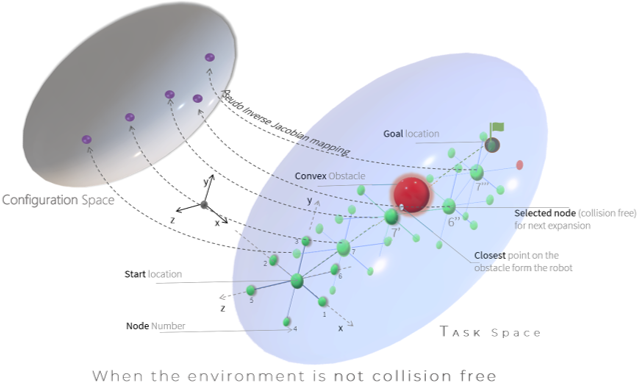
Geometric motion planning in task space using complementarity constraints to avoid collisions.
Anik Sarker
Stony Brook University, December 2018
Webpage •
PDF (can be provided upon request);
Human Pose Estimation and Algorithms for Alignment & Registration Problems: Applications in Robotics, Computer Vision, and Stroke Rehabilitation.
Anik Sarker
Virginia Tech, September 2025
PDF (can be provided upon request)
Amazon (Amazon Robotics)
Applied Scientist Intern Feb 2025 - Aug 2025 Project: Foundation Models for Multi-Agent Movement
Meta (Reality Labs Research)
Research Scientist Intern June 2024 - Feb 2025 Project: Real Time Hand Tracking Algorithm
Object Detection: Fine-tune custom dataset with YOLO V8, NAS, Facebook Detr
Authors: Anik Sarker · Mautushi Das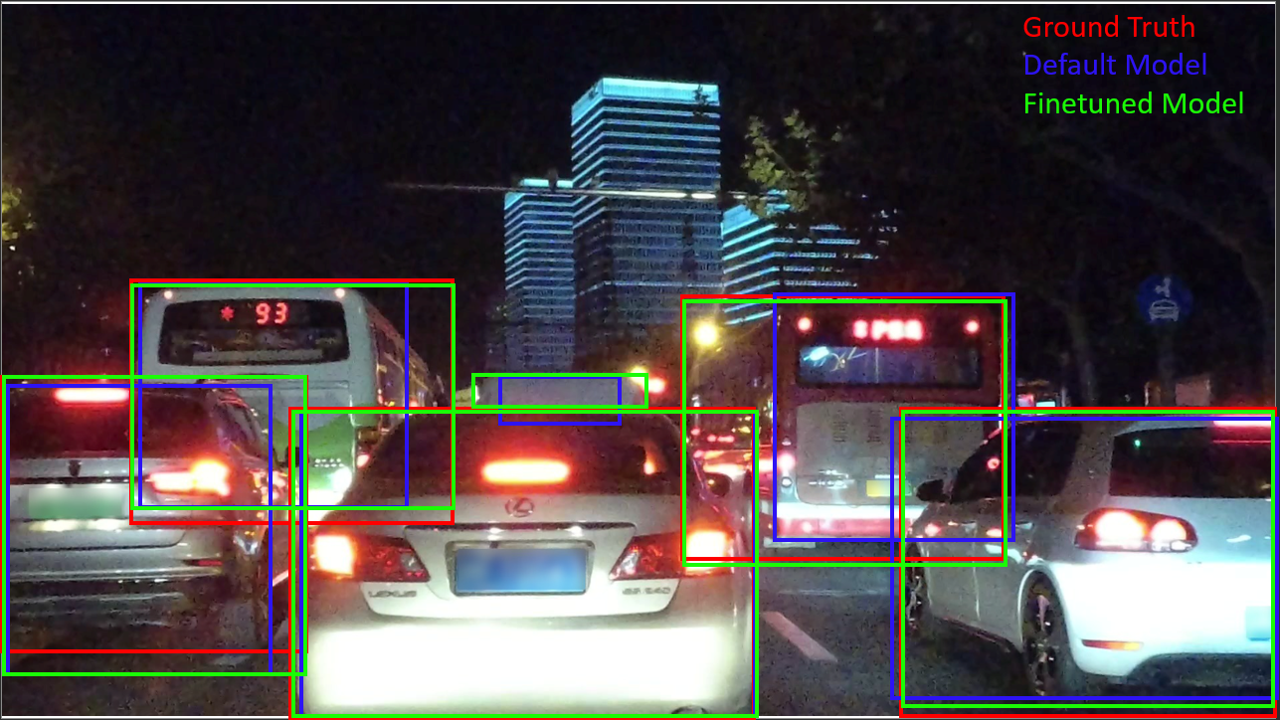

Human pose reconstruction and ergonomic pose classification
Authors: Anik Sarker · Seetharam Krishnapuram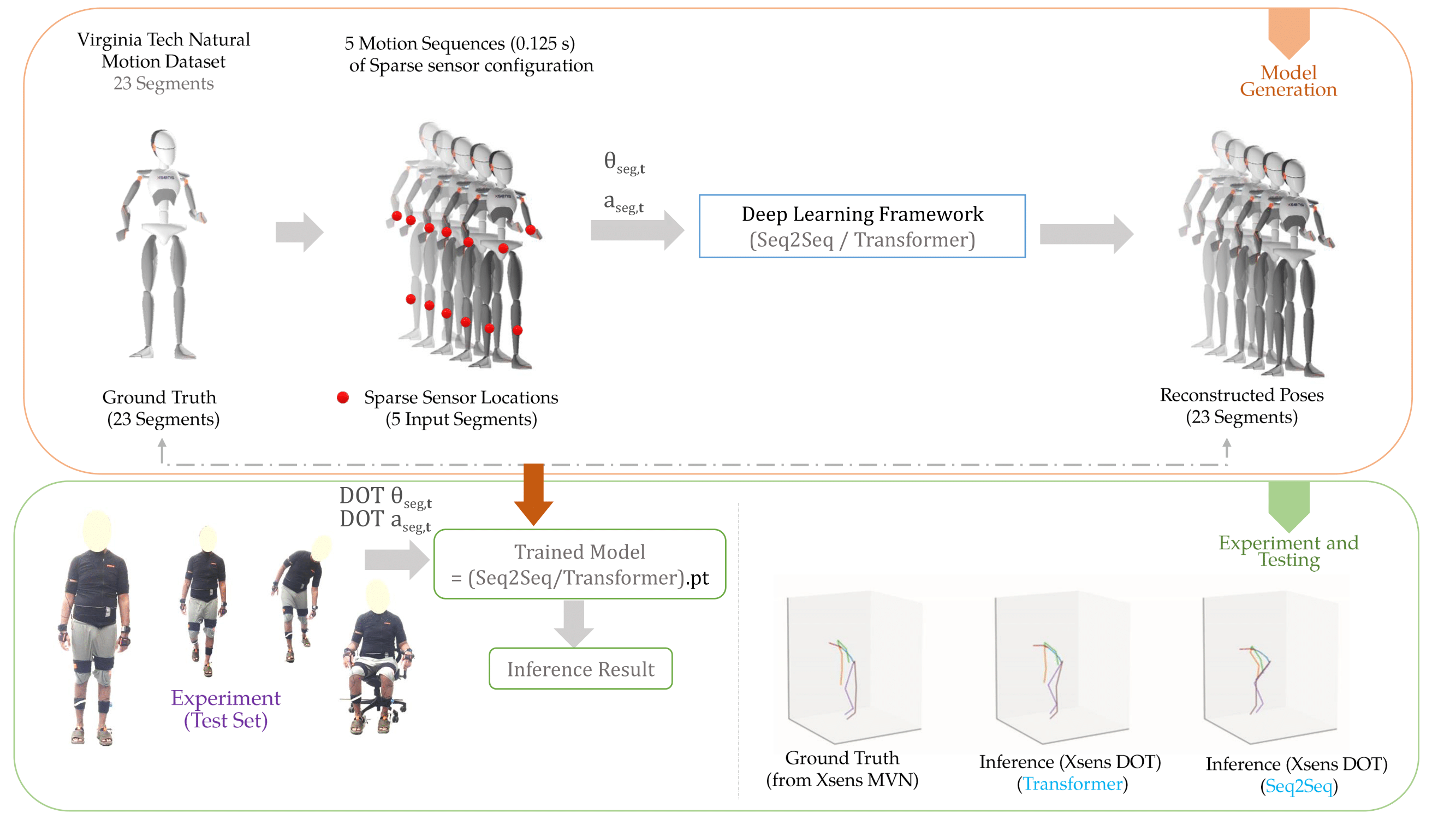
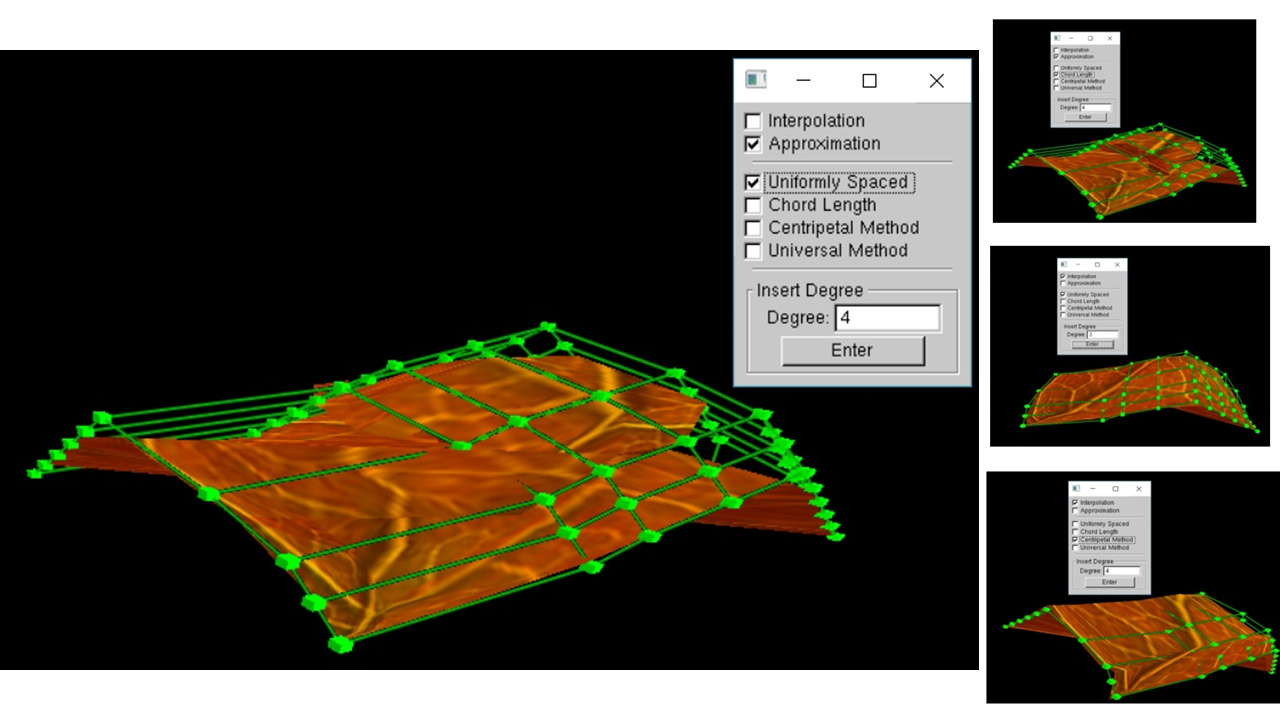
B-SPLINE Global Surface Interpolation and Approximation
Authors: Anik Sarker · Miguel Vazquez2025
- October 22-23, I will be attending ICCV 2025 main Conference in Honolulu, Hawaii! I will be presenting our work on "Correspondence-Free Fast and Robust Spherical Point Pattern Registration."
- September 17, PhD Defense successfully completed!
- June 25, Our paper "Correspondence-Free Fast and Robust Spherical Point Pattern Registration." accepted for ICCV 2025.
- From February, I will join Amazon Robotics as an Applied Scientist Intern. I will be working with the Foundation Model Team.
2024
Starting from June, I will be joining Meta (Reality Labs) as a Research Scientist Intern for 24 weeks.I will be working with the Sensor Fusion and Tracking Team.
From December, I will continue working at Meta as a student researcher for the next 8 weeks.
2023
On November 14th, I passed my PhD preliminary exam. I am a PhD candidate now!
On August 22nd, our paper was accepted in IEEE Sensors! (Accepted Version)